



![]() Press release
Press release
282KB
Comunicato Stampa disponibile solo in lingua originale.
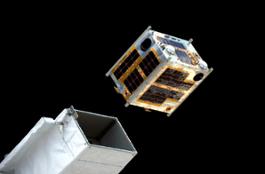
27 April 2016In a live space-to-ground test of human–robot cooperation, ESA astronaut #timpeake will control a rover on Earth on Friday from the International Space Station, helping prepare for future exploration missions.
On 29 April, ESA astronaut #timpeake will operate a terrestrial rover nicknamed Bridget from the Station as part of a series of experiments investigating how humans interact with robotic systems and vehicles.
The 154 kg rover will be driven by Tim starting at 10:00 GMT (12:00 CEST) over simulated Mars terrain in Stevenage, UK, as though he were searching for scientific targets such as rocks. The 30 x 13 m Mars Yard is split into lit and dark areas to simulate, for example, roving into a cave or a shadowed crater.
The rover was developed by Airbus D&S, who are working with ESA and the UK Space Agency to investigate controlling robots on simulated planets.
“Tim will drive it for about 90 minutes,” says Jessica Grenouilleau, of ESA’s Robotics and Future Projects Office.“Interestingly, he will only be provided with basic training on how to react to situations that the rover encounters, as the experiment aims in part to study how humans interact extemporaneously with robotic systems.”
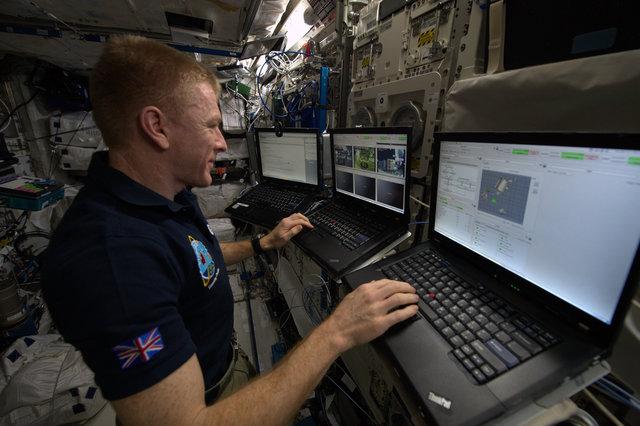
On board the Station, Tim will connect via video and data links to the rover at Stevenage using a sophisticated ‘delay-tolerant’ network, a sort of ‘Internet in space’, which is itself part of the experiment.
This network enables experiment controllers to simulate losses in connections, delays in responding to commands and other disruptions that are expected in future when an astronaut in orbit operates a rover on Mars or an asteroid, for example.
“Future missions into the Solar System will include humans working hand-in-hand with robots as our scouts and proxies, gathering scientific and physical information that will make human exploration feasible,” says Philippe Schoonejans, Head of Robotics and Future Projects and coordinator for ESA’s Meteron project, under which the rover-driving experiment is being conducted.
The experiment involves teams at the Mars Yard in Stevenage, ESA’s ESOC operations centre, Darmstadt, Germany, which will serve as the mission control centre for the experiment, and Belgium’s Station User Support and Operation Centre in Brussels, which will serve as the interface to the ISS.
Control will then be passed to Tim, at about 14:20 GMT (16:20 CEST), who will command the rover to drive ‘into the dark’, avoiding obstacles and identifying potential science targets, which will be marked with a distinctive fluorescent marker.
Once the targets have been identified and mapped, Tim will drive the rover out of the shaded area and hand control back to ESOC to drive the rover back to its starting point.
Realtime updates will be provided via the links below. Links to live video showing experiment progress will available on 29 April.

Bridget_the_rover
![]() 1024x768, 595KB
1024x768, 595KB
Controlling_from_space
![]() 4940x3292, 3MB
4940x3292, 3MB
Mars_Yard
![]() 1280x837, 1MB
1280x837, 1MB
Mission_control
![]() 3264x2448, 2MB
3264x2448, 2MB
![]() Press release
Press release
282KB
News correlate |
||

|

|
|
giugno 20, 2016
|
maggio 03, 2016
|
maggio 02, 2016
|
|
Comunicato Stampa disponibile solo in lingua originale. 18 June 2016ESA astronaut #timpeake, NASA astronaut Tim Kopra and Rus... |
Comunicato Stampa disponibile solo in lingua originale. 29 April 2016ESA astronaut #timpeake today controlled, from the Inter... |
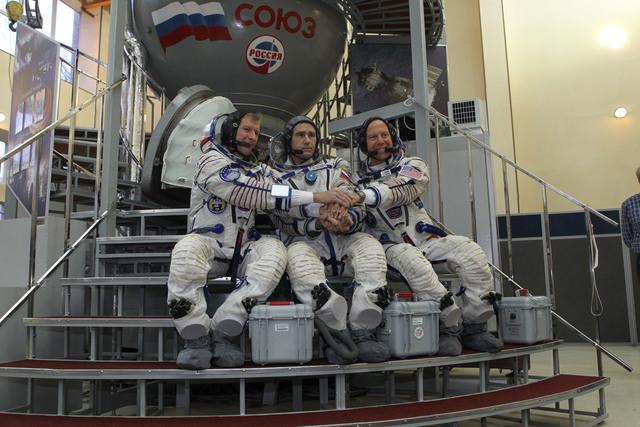
Comunicato Stampa disponibile solo in lingua originale. 29 April 2016ESA astronaut #timpeake and his crewmates Yuri Malenchen... |
Ti potrebbe interessare anche |
||

|

|

|
gennaio 05, 2016
|
dicembre 11, 2015
|
dicembre 01, 2015
|
|
Comunicato Stampa disponibile solo in lingua originale. ESA astronaut #timpeake and NASA astronaut Tim Kopra will exit the In... |
Comunicato Stampa disponibile solo in lingua inglese L'astronauta dell'ESA Tim Peake, l'astronauta della NASA Tim Kopra e il coma... |
Comunicato Stampa disponibile solo in lingua inglese L'astronauta dell'ESA Tim Peake, l'astronauta della NASA Tim Kopra e il coma... |
© Copyright 2024



















 Inglese
Inglese  Condividi
Condividi Condividi via mail
Condividi via mail  Automotive
Automotive Sport
Sport Events
Events Art&Culture
Art&Culture Design
Design Fashion&Beauty
Fashion&Beauty Food&Hospitality
Food&Hospitality Tecnologia
Tecnologia Nautica
Nautica Racing
Racing Excellence
Excellence Corporate
Corporate OffBeat
OffBeat Green
Green Gift
Gift Pop
Pop Heritage
Heritage Entertainment
Entertainment Health & Wellness
Health & Wellness