
























![]() Comunicato stampa
Comunicato stampa
128KB
Volvo Cars presenta una soluzione esclusiva e completa che consente di integrare le automobili con guida autonoma nel traffico reale – con persone comuni sedute al posto di guida.
“Ci stiamo addentrando in un territorio inesplorato nell’ambito della guida autonoma,” ha commentato Peter Mertens, Senior Vice President Ricerca & Sviluppo di Volvo Car Group. “Nessuno ha mai compiuto prima questo emozionante passo, ovvero condurre un esperimento pilota in condizioni reali, con l’ambizione di permettere a persone comuni di sedersi al posto di guida nel normale traffico della rete stradale pubblica.”
Il progetto Drive Me entra nel suo secondo anno di vita e Volvo Cars si sta avvicinando rapidamente all’obiettivo di affidare 100 vetture con guida autonoma a clienti che le guideranno su una serie di strade selezionate nell’area di Goteborg entro il 2017. Il progetto pilota pubblico, frutto di una collaborazione unica nel suo genere fra legislatori, enti di gestione dei trasporti, una città importante e una casa automobilistica, è un componente fondamentale del piano di Volvo Cars, che prevede il conseguimento di una mobilità sostenibile e la garanzia di un futuro senza incidenti automobilistici.
Da tempo sprecato a tempo ben speso
Basandosi su un’ampia analisi dei guasti tecnici potenziali, Volvo Cars ha progettato un sistema di guida autonoma completo, sostenibile a livello produttivo. Il fattore fondamentale che ha consentito questo passo avanti è una complessa rete di sensori, sistemi di posizionamento basati sul cloud e tecnologie intelligenti di frenata e controllo dello sterzo.
“La guida autonoma cambierà radicalmente il nostro modo di considerare la guida. In futuro, si potrà scegliere fra guida autonoma e guida attiva,” spiega Mertens. “Ciò trasformerà gli spostamenti quotidiani per motivi di lavoro da tempo sprecato in tempo guadagnato, che potrà essere impiegato per svolgere altre attività lavorative e non.”
Una tecnologia che si spinge oltre
Il sistema Autopilot di Volvo Cars è stato progettato per essere sufficientemente affidabile da consentire all’automobile di gestire qualunque aspetto della guida in modalità autonoma. La tecnologia fa dunque un importantissimo passo avanti spingendosi oltre i sistemi automobilistici testati fino ad ora, dato che prevede dei meccanismi in grado di tollerare eventuali guasti.
“E’ relativamente semplice costruire e presentare un prototipo con guida autonoma, ma se si vuole influire davvero sulla realtà, bisogna progettare e produrre un sistema completo che sia sicuro, robusto e accessibile al cliente medio,” precisa Erik Coelingh, Tecnico Specialista di Volvo Cars.
La sfida principale è la realizzazione di un Autopilot abbastanza robusto da gestire tutti gli scenari di traffico e gli eventuali problemi tecnici che possono presentarsi. Non ci si può aspettare che il guidatore sia sempre pronto a intervenire prontamente in una situazione critica. Inizialmente, le vetture guideranno in modalità autonoma su una serie di strade selezionate caratterizzate da condizioni idonee, ad esempio senza traffico in senso opposto, ciclisti e pedoni.
Sistemi di backup
“Rendere questo complesso sistema affidabile al 99% non è sufficiente. E’ necessario arrivare molto più vicino al 100% prima di poter consentire alle automobili con guida autonoma di mischiarsi con gli altri utenti della strada,” spiega Erik Coelingh. “Qui l’approccio è simile a quello adottato nell’industria aeronautica. La nostra architettura failoperational, che garantisce l’operatività dopo eventuali avarie, include sistemi di backup che fanno sì che l’Autopilot continui a funzionare correttamente anche nel caso in cui un elemento del sistema risulti disattivato.” Ad esempio, la probabilità di un guasto all’impianto frenante è molto bassa, ma un veicolo con guida autonoma necessita di un secondo impianto indipendente che ne assicuri l’arresto, poiché è improbabile che il guidatore sia sempre pronto a schiacciare il pedale del freno.
In grado di gestire gli scenari complessi
Sulla strada, questa soluzione tecnologica completa riuscirà a gestire gli scenari più complessi, dai tranquilli flussi di pendolari al traffico intenso e alle situazioni di emergenza.
Proprio come farebbe un automobilista esperto, le situazioni potenzialmente critiche vengono affrontate con ragionevole cautela. In caso di reale emergenza, tuttavia, l’auto reagisce più velocemente della maggior parte degli esseri umani,” aggiunge Erik Coelingh. Quando la guida autonoma non è più disponibile – a causa di condizioni atmosferiche eccezionali o di un malfunzionamento tecnico o se si è arrivati al termine del percorso – al guidatore viene chiesto di subentrare di
nuovo.
Se il guidatore non interviene entro un determinato lasso di tempo, l’auto cercherà un punto sicuro per fermarsi. Benefici per i consumatori e per la società Oltre a semplificare la vita delle persone e a trasformare il percorso quotidiano verso e dal luogo di lavoro da tempo perso in tempo ben speso, le vetture con guida autonoma offrono benefici a livello ambientale. Volvo Cars prevede che la guida autonoma possa ridurre il consumo di carburante. Questa tecnologia potrebbe inoltre migliorare i flussi del traffico e aprire nuove opportunità a livello urbanistico e di investimenti infrastrutturali più efficienti in termini di costi.
“Lo sviluppo di una soluzione tecnologica completa per le automobili con guida autonoma rappresenta un importantissimo passo avanti. Una volta avviato, il progetto pilota ci fornirà informazioni preziose sull’introduzione delle vetture con guida autonoma nel contesto di traffico reale e ci aiuterà a capire come queste possono contribuire a una mobilità sostenibile. I nostri veicoli intelligenti rappresentano un elemento importante della soluzione, ma è essenziale un approccio sociale di più ampio respiro per offrire una mobilità personale sostenibile in futuro. Questa esclusiva cooperazione fra più settori è il fattore chiave per un’efficace adozione dei veicoli con guida autonoma,” conclude Erik Coelingh.
Alcuni dei componenti della soluzione Drive Me:
Tecnologie di sensori
Volvo Cars sta sviluppando una soluzione olistica in grado di rilevare l’esatta posizione della vettura e fornire una panoramica a 360° dell’area intorno ad essa. Ciò è reso possibile grazie all’impiego di numerosi radar, telecamere e sensori laser. Una rete ridondante di computer elabora le informazioni, generando una mappatura in tempo reale degli oggetti in movimento e fermi presenti nell’area circostante.
La rilevazione precisa della posizione si basa su queste informazioni, oltre che su un sistema GPS e su una cartina digitale tridimensionale ad alta definizione che viene aggiornata continuamente con i dati in tempo reale. Il sistema è sufficientemente affidabile da poter funzionare senza la supervisione dell’automobilista.
Radar e telecamera abbinati
Il sistema combinato di telecamera e radar a onda continua che opera in modulazione di frequenza a 76 GHz, integrato nel parabrezza, è uguale a quello presente sulla nuova XC90. Si tratta di un sistema in grado di leggere i segnali stradali e rilevare la curvatura della strada e la presenza di ostacoli sulla strada, come ad esempio altri veicoli e pedoni.
Radar perimetrali
Quattro radar collocati dietro i paraurti anteriore e posteriore (uno per ogni angolo della vettura) riescono a localizzare gli oggetti in tutte le direzioni. Grazie a una rilevazione basata su un ampio movimento circolare da sinistra a destra e viceversa, e trasmettendo le onde che rimbalzano su segnali stradali, pali e gallerie, i radar riescono a monitorare a 360° l’area attorno all’auto.
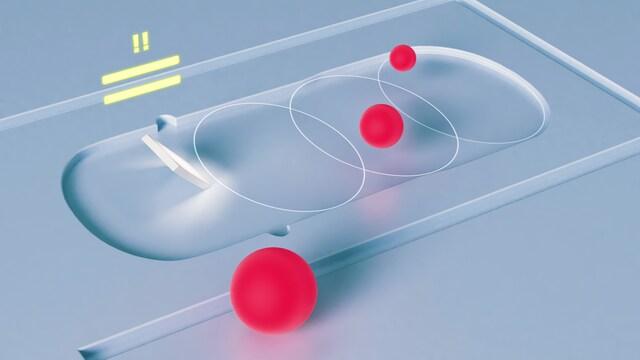
Vista panoramica a 360°
Quattro telecamere intercettano gli oggetti in prossimità del veicolo. Due sono collocate sotto gli specchietti laterali esterni, una nel paraurti posteriore e un’altra nella griglia frontale. Oltre a rilevare gli oggetti a distanza ravvicinata, queste telecamere tengono sotto controllo le linee di demarcazione delle corsie. Le telecamere hanno un’elevata gamma dinamica e riescono a gestire cambiamenti repentini delle condizioni di luminosità, ad esempio all’ingresso di una galleria.
Scanner laser a fascio multiplo
Questo sistema a sensori è posto nella sezione anteriore del veicolo, sotto la presa d’aria. Lo scanner è in grado di individuare gli oggetti davanti all’auto e garantisce una risoluzione angolare molto elevata. Può inoltre distinguere fra oggetti di tipo diverso. Questo esclusivo sensore laser ha una portata di 150 metri per i veicoli e copre un campo divisivo di 140°. queste telecamere tengono sotto controllo le linee di demarcazione delle corsie.
Le telecamere hanno un’elevata gamma dinamica e riescono a gestire cambiamenti repentini delle condizioni di luminosità, ad esempio all’ingresso di una galleria.
Scanner laser a fascio multiplo
Questo sistema a sensori è posto nella sezione anteriore del veicolo, sotto la presa d’aria. Lo scanner è in grado di individuare gli oggetti davanti all’auto e garantisce una risoluzione angolare molto elevata. Può inoltre distinguere fra oggetti di tipo diverso. Questo esclusivo sensore laser ha una portata di 150 metri per i veicoli e copre un campo visivo di 140°.
Telecamera con lente trifocale
Inoltre, una telecamera con lente trifocale posizionata dietro la sezione superiore del parabrezza racchiude in pratica tre telecamere in una, fornendo una panoramica ampia a 140°, una panoramica a 45° e una panoramica a lunga portata, ma stretta, a 34° per una migliore percezione della profondità e la rilevazione di oggetti lontani. La telecamera riesce a rilevare immediatamente un pedone che compare all’improvviso e altri pericoli stradali inattesi.
Radar a lunga portata
Due radar a lunga portata collocati nel paraurti posteriore garantiscono una buona visuale dell’area dietro all’auto. Questa tecnologia è utile soprattutto quando si cambia corsia di marcia, poiché è in grado di rilevare gli oggetti in rapido movimento che sopraggiungono da dietro.
Sensori a ultrasuoni
Dodici sensori a ultrasuoni intorno alla vettura vengono utilizzati per individuare gli oggetti vicini ad essa e per supportare la guida autonoma a basse velocità.
I sensori sono basati sulla tecnologia che viene utilizzata per le attuali funzioni di assistenza al parcheggio ottimizzate tramite elaborazione dei segnali avanzata. Un esempio tipico di situazione in cui questa tecnologia risulta utile è la rilevazione immediata di situazione inattese, come la presenza di pedoni o pericoli sulla strada vicini all’auto.
Mappa digitale tridimensionale ad alta definizione
Una mappa digitale in 3D ad alta definizione è lo strumento utilizzato per fornire al veicolo informazioni sul contesto circostante, ad esempio altitudine, curvatura della strada, numero di corsie di marcia, geometria delle gallerie, guard rail, segnaletica, uscite, ecc. In molti casi la geometria della posizione è precisa al centimetro.
Posizionamento ad alte prestazioni
Il dispositivo GPS ad alte prestazioni costituisce un elemento del sistema di controllo della posizione che è stato ottimizzato grazie all’abbinamento di un GPS avanzato, di un accelerometro con 3 gradi di libertà e un giroscopio con 3 gradi di libertà. Abbinando l’immagine a 360° creata dai numerosissimi sensori all’immagine della mappa, il veicolo ottiene informazioni sulla sua posizione rispetto al contesto circostante.
Abbinando le informazioni dei sensori e la mappa, la vettura Drive Me è in grado di scegliere in tempo reale la traiettoria migliore tenendo conto di variabili come la curvatura della strada, il limite di velocità, la segnaletica temporanea e gli altri veicoli.
Servizio basato sul cloud
Il servizio basato sul cloud è collegato alle centrali di controllo degli enti di gestione del traffico. Ciò garantisce che siano sempre disponibili informazioni sul traffico aggiornatissime. Gli operatori delle centrali di controllo hanno inoltre la possibilità di interagire con gli automobilisti suggerendo loro di disattivare la modalità di guida autonoma se necessario.


134458_Peter_Mertens_Senior_Vice_President_Research_Development
![]() 2267x3400, 648KB
2267x3400, 648KB
136303_Volvo_Car_Group_initiates_world_unique_Swedish_pilot_project_with_self
![]() 5100x3400, 1MB
5100x3400, 1MB
136554_Volvo_Car_Group_initiates_world_unique_Swedish_pilot_project_with_self
![]() 1920x1080, 369KB
1920x1080, 369KB
145820_Autonomous_drive_commuting
![]() 3927x2657, 2MB
3927x2657, 2MB
146014_Autonomous_drive_commuting
![]() 3898x2598, 2MB
3898x2598, 2MB
146031_Volvo_Car_Group_initiates_world_unique_Swedish_pilot_project_with_self
![]() 5100x3400, 1MB
5100x3400, 1MB
146032_Erik_Coelingh_Technical_Director_Active_Safety
![]() 2407x3400, 721KB
2407x3400, 721KB
158889_Autonomous_drive_technology_Cloud_based_3D_digital_map
![]() 1920x1292, 289KB
1920x1292, 289KB
158890_Autonomous_drive_technology_Surround_radars
![]() 4298x2418, 1MB
4298x2418, 1MB
158891_Autonomous_drive_technology_Surround_vision
![]() 4298x2418, 1MB
4298x2418, 1MB
158892_Autonomous_drive_technology_Multiple_beam_laser_scanner
![]() 4298x2418, 1MB
4298x2418, 1MB
158893_Autonomous_drive_technology_Ultrasonic_sensors
![]() 4298x2418, 1MB
4298x2418, 1MB
158894_Autonomous_drive_technology_Complete_system_solution
![]() 4298x2418, 1MB
4298x2418, 1MB
158895_Autonomous_drive_technology_detection_on_the_road
![]() 1920x1080, 350KB
1920x1080, 350KB
158896_Autonomous_drive_technology_detection_on_the_road
![]() 1920x1080, 304KB
1920x1080, 304KB
158897_Autonomous_drive_technology_detection_on_the_road
![]() 1920x1080, 330KB
1920x1080, 330KB
158898_Karl_Johan_Runnberg
![]() 2550x3400, 1MB
2550x3400, 1MB
158899_Jonas_Nilsson
![]() 2267x3400, 1MB
2267x3400, 1MB
158900_Henrik_Lind
![]() 2267x3400, 1MB
2267x3400, 1MB
158902_Autonomous_drive_technology_trifocal_camera
![]() 5100x3400, 2MB
5100x3400, 2MB
158903_Autonomous_drive_technology_ultrasonic_sensor
![]() 5100x3400, 2MB
5100x3400, 2MB
158904_Autonomous_drive_technology_surround_view_cameras
![]() 4945x3297, 3MB
4945x3297, 3MB
158905_Autonomous_drive_technology_surround_radar
![]() 5100x3400, 2MB
5100x3400, 2MB
158906_Autonomous_drive_technology_long_range_radar
![]() 5100x3400, 2MB
5100x3400, 2MB
158907_Autonomous_drive_technology_combined_radar_and_camera
![]() 5100x3400, 2MB
5100x3400, 2MB
![]() Comunicato stampa
Comunicato stampa
128KB
News correlate |
||

|

|

|
marzo 13, 2024
|
gennaio 23, 2024
|
settembre 01, 2023
|
|
Volvo Cars ha stretto un accordo di collaborazione con Breathe Battery Technologies (Breathe), divenendo così la prima Casa automo... |
Comunicato Stampa disponibile solo in lingua originale. ● Legendary Superyacht Builder to Integrate Volvo Penta’s IPS Profes... |
Comunicato Stampa disponibile solo in lingua originale. Volvo Autonomous Solutions (V.A.S.) achieves industry-first milestone with... |
Ti potrebbe interessare anche |
||

|

|

|
aprile 14, 2023
|
marzo 07, 2023
|
gennaio 18, 2023
|
|
La sveglia suona prestissimo e la tentazione è di spegnerla e continuare a dormire. Gli uccellini non stanno ancora cinguettando, ... |
Oggi abbiamo annunciato la prossima apertura di un nuovissimo #techhub a #cracovia, la seconda maggiore città polacca. Sarà un imp... |
Comunicato Stampa disponibile solo in lingua originale. Volvo Group Venture Capital AB invests in the Canadian founded company #wa... |
© Copyright 2024











 Inglese
Inglese  Condividi
Condividi Condividi via mail
Condividi via mail  Automotive
Automotive Sport
Sport Events
Events Art&Culture
Art&Culture Design
Design Fashion&Beauty
Fashion&Beauty Food&Hospitality
Food&Hospitality Tecnologia
Tecnologia Nautica
Nautica Racing
Racing Excellence
Excellence Corporate
Corporate OffBeat
OffBeat Green
Green Gift
Gift Pop
Pop Heritage
Heritage Entertainment
Entertainment Health & Wellness
Health & Wellness